 |
| November 01, 2016 | Volume 12 Issue 41 |
Designfax weekly eMagazine

Archives
Partners
Manufacturing Center
Product Spotlight
Modern Applications News
Metalworking Ideas For
Today's Job Shops
Tooling and Production
Strategies for large
metalworking plants
Engineer's Toolbox:
Microstepping -- myths and realities

The lure of microstepping a two-phase stepper motor is compelling. Visions of microstepping a 1.8-degree hybrid stepper motor with 256 microsteps per full step flash in your mind. The resolution of 51,200 microsteps per revolution entices you. You're glad you don't own stock in high-resolution encoder companies.
Where's the catch?
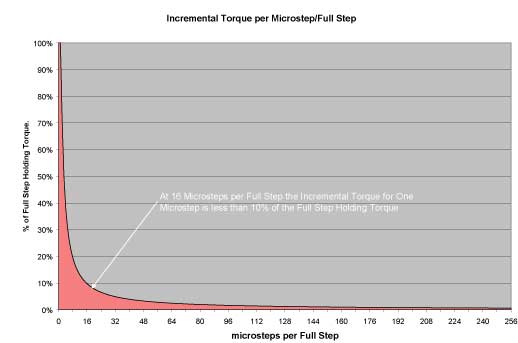
The real compromise is that as you increase the number of microsteps per full step, the INCREMENTAL torque per microstep drops off drastically. Resolution increases, but accuracy will actually suffer.
Few, if any, stepper motors have a pure sinusoidal torque vs. shaft position, and all have higher-order harmonics that, in fact, distort the curve and affect accuracy. And while microstepping drives have come a long way too, they still only approximate a true sine wave.
Also significant is that any load torque will result in a "magnetic backlash," displacing the rotor from the intended position until sufficient torque is generated.
The actual expression for incremental torque for a single microstep is:
1. TINC = THFS x sin (90/µPFS)
The incremental torque for N microsteps is:
2. TN = THFS x sin ((90 x N)/µPFS))
Where:
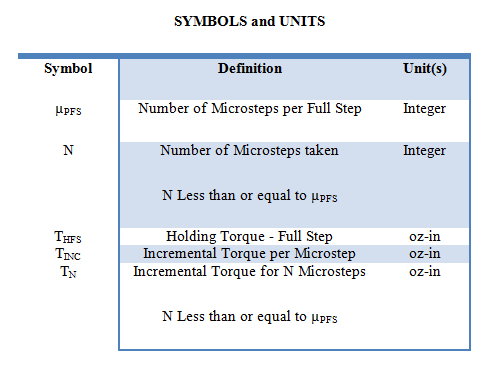
Table 1 dramatically quantifies the significant impact of the incremental torque per microstep as a function of the number of microsteps per full step.
A full step is considered 1 microstep per full step for Equations 1 and 2. A half step is 2 microsteps per full step.
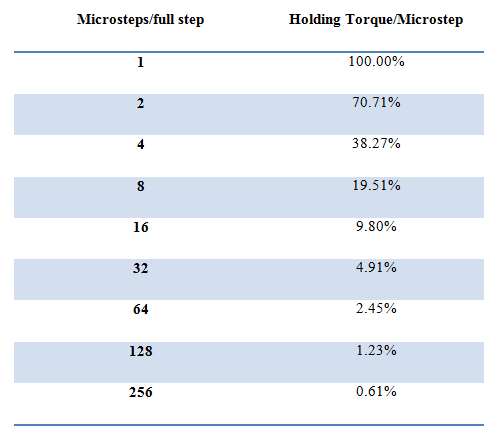
Incremental Torque per Microstep
As the Number of Microsteps per Full Step Increases
(Table 1)
The consequence is that if the load torque plus the motor's friction and detent torque is greater than the incremental torque of a microstep, successive microsteps will have to be realized until the accumulated torque exceeds the load torque plus the motor's friction and detent torque.
Simply stated, taking a microstep does not mean the motor will actually move! And if reversing direction is desired, a whopping number of microsteps may be needed before movement occurs. That's because the motor shaft torque must be decremented from whatever positive value it has to a negative value that will have sufficient torque to cause motion in the negative direction.
Accuracy vs. resolution
"What if the motor is not loaded?" you ask. Thinking of using microstepping for some type of pointing or inertial positioning?
Well, the stepper motor still has friction torque due to its bearings, and it has a detent torque, in addition to other harmonic distortions. You'll have to "wind up" enough incremental torque to overcome the bearing friction. Even more disruptive than the bearing friction is the detent torque, which is typically 5 percent to 20 percent of the holding torque. Sometimes the detent torque is adding to the overall torque generation, sometimes it is subtracting from the powered torque generation. In any case, it wreacks havoc with your overall accuracy.
Indeed, some manufacturers fabricate "microstepping" versions of their motors. Their efforts typically are to reduce the detent torque, usually at the expense of holding torque, to make the torque vs. rotor position closer to a sine wave, and to improve linearity of torque vs. current. These efforts reduce, but do not eliminate, the compromises associated with microstepping in regards to accuracy.
How about using a look-up table to "correct" for the inaccuracies in the motor and microstepping drive? That too has been utilized. The problem is that if the load torque changes from when the look-up table was made, the results can be worse than if you had not utilized a "calibrated" table at all!
Why microstep then?
There are still compelling reasons other than high resolution for microstepping. They include:
- Reduced mechanical noise;
- Gentler actuation mechanically; and
- Reduces resonances problems.
In fact, taking an infinite number of microsteps per full step results in two-phase synchronous permanent magnet ac motor operation, with speed a function of the frequency of the ac power supply. The rotor will lag behind the rotating magnetic field until sufficient torque is generated to accommodate the load.
Download this article as a handy PDF by clicking here.
Want to learn more about motor control? Go to MICROMO's technical library resource page www.micromo.com/technical-library/technical-library.
Source: MICROMO
Published November 2016
Rate this article
View our terms of use and privacy policy