 |
| January 31, 2012 | Volume 08 Issue 04 |
Designfax weekly eMagazine

Archives
Partners
Manufacturing Center
Product Spotlight
Modern Applications News
Metalworking Ideas For
Today's Job Shops
Tooling and Production
Strategies for large
metalworking plants
Leaping lizards, dinosaurs inspire robot design

Students in the Mechanics of Organisms research-based teaching lab measure the leaping prowess of an Agama lizard. [Image courtesy: PolyPEDAL Lab & CiBER/UC Berkeley.
By Robert Sanders, UC Berkeley
Leaping lizards have a message for robots: Get a tail.
University of California, Berkeley, biologists and engineers, including undergraduate and graduate students, studied how lizards manage to leap successfully even when they slip and stumble. They found that lizards swing their tails upward to prevent them from pitching head-over-heels into a rock.
But after the team added a tail to a robotic car named Tailbot, they discovered that counteracting the effect of a slip is not as simple as throwing your tail in the air. Instead, robots and lizards must actively adjust the angle of their tails just right to remain upright.
"We showed for the first time that lizards swing their tail up or down to counteract the rotation of their body, keeping them stable," said team leader Robert J. Full, UC Berkeley professor of integrative biology. "Inspiration from lizard tails will likely lead to far more agile search-and-rescue robots, as well as ones having greater capability to more rapidly detect chemical, biological or nuclear hazards."
Agile therapod dinosaurs like the velociraptor depicted in the movie Jurassic Park may also have used their tails as stabilizers to prevent forward pitch, Full said. Their tail movement is illustrated in a prescient chase sequence from the 1993 movie in which the animated animal leaps from a balcony onto a T. rex skeleton.
"Muscles willing, the dinosaur could be even more effective with a swing of its tail in controlling body attitude than the lizards," Full said.
Student involvement crucial to research
Full and his laboratory colleagues, including both engineering and biology students, reported their discoveries online on Jan. 5 in advance of publication in the Jan. 12 print edition of the journal Nature. The paper's first author, mechanical engineering graduate student Thomas Libby, also reported the results on Jan. 7 at the annual meeting of the Society for Integrative and Comparative Biology in Charleston, SC.
Full is enthusiastic about the interplay fostered at UC Berkeley between biologists and engineers in the Center for Interdisciplinary Bio-inspiration in Education and Research (CiBER) lab, within which he offers a research-based teaching lab that provides dozens of undergraduate students with an opportunity to conduct cutting-edge research in teams with graduate students. Each team experiences the benefits of how biologists and engineers approach a problem.
"Learning in the context of original discovery, finding out something that no one has ever know before, really motivated me," said former UC Berkeley integrative biology undergraduate Talia Moore, now a graduate student in the Department of Organismic and Evolutionary Biology at Harvard University. "This research-based lab course showed me how biologists and engineers can work together to benefit both fields."
"This paper shows that research-based teaching leads to better learning and simultaneously can lead to cutting-edge research," added Full, who last year briefed the U.S. House of Representative's Science, Technology, Engineering and Mathematics (STEM) Education Caucus on this topic. "It also shows the competitive advantage of interdisciplinary approaches and how involvement of undergraduates in research can lead to innovation."
From gecko toe hairs to tails
Full's research over the past 20 years has revealed how the toe hairs of geckos assist them in climbing smooth vertical surfaces and, more recently, how their tails help to keep them from falling when they slip and to right themselves in mid-air.
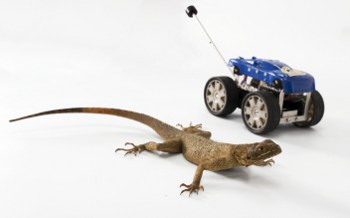
An Agama lizard next to Tailbot, a toy car with an attached tail. Sensors detect Tailbot's orientation and swing the tail upward to keep the robot from pitching forward, similar to the way the lizard uses its tail. [Photo by Robert Full lab, UC Berkeley.]
The new research tested a 40-year-old hypothesis that the two-legged theropod dinosaurs, the ancestors of birds, used their tails as stabilizers while running or dodging obstacles or predators. In Full's teaching laboratory, students noticed a lizard's recovery after slipping during a leap and thought a study of stumbling would be a perfect way to test the value of a tail.
In the CiBER lab, Full and six of his students used high-speed videography and motion capture to record how a red-headed African Agama lizard handled leaps from a platform with different degrees of traction, from slippery to easily gripped.
They coaxed the lizards to run down a track, vault off a low platform, and land on a vertical surface with a shelter on top. When the friction on the platform was reduced, lizards slipped, causing their bodies to potentially spin out of control.
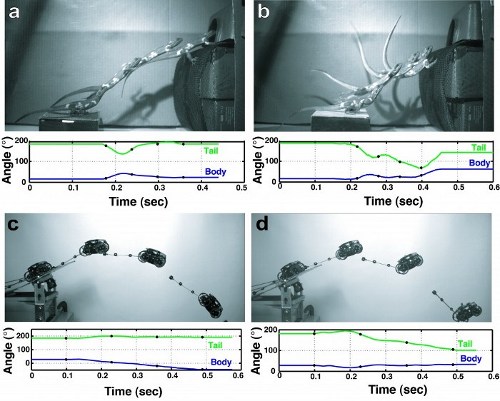
[Image: COPYRIGHT NATURE 2012.]
When the researchers saw how the lizard used its tail to counteract the spin, they created a mathematical model as well as Tailbot a toy car equipped with a tail and small gyroscope to sense body position to better understand the animal's skills. With a tail but no feedback from sensors about body position, Tailbot took a nose dive when driven off a ramp, mimicking a lizard's take-off. When body position was sensed and fed back to the tail motor, however, Tailbot was able to stabilize its body in midair. The actively controlled tail effectively redirected the angular momentum of the body into the tail's swing, as happens with leaping lizards, Full said.
Inertial-assisted robotics
Tailbot's design pushed the boundaries of control in robotics in an area researchers call inertial-assisted robotics, an attention-grabber at last October's meeting of the International Conference on Intelligent Robots and Systems. The UC Berkeley researchers' paper, presented by Libby and fellow mechanical engineering graduate student Evan Chang-Siu, was one of five finalists there among more than 2,000 robot studies.
"Engineers quickly understood the value of a tail," Libby said, noting that when he dropped Tailbot nose-down, it was able to right itself before it had dropped a foot. "Robots are not nearly as agile as animals, so anything that can make a robot more stable is an advancement, which is why this work is so exciting."
Full and his students are now investigating the role of the tail in controlling pitch, roll, and yaw while running.
UC Berkeley coauthors include Full and students Moore, Libby, and Chang-Siu, along with Department of Integrative Biology undergraduate Deborah Li and graduate students Ardian Jusufi in the Department of Integrative Biology and Daniel Cohen in the Department of Bioengineering. Chang-Siu works with Masayoshi Tomizuka, professor of mechanical engineering, in UC Berkeley's Mechanical Systems Control Laboratory.
Video caption: UC Berkeley professor Robert Full discusses his research on lizards and geckos and how the biomechanical principles he and his students discovered apply to the design of robots. [Video courtesy: Nature & CiBER/UC Berkeley]
The work was funded by the National Science Foundation, including the NSF's Integrative Graduate Education and Research Traineeship (IGERT) program, and the Micro Autonomous Systems Technologies (MAST) consortium, a large group of researchers funded in part by the U.S. Army Research Laboratory that is focused on creating autonomous sensing robots.
Published January 2012
Rate this article
View our terms of use and privacy policy