 |
| December 24, 2019 | Volume 15 Issue 49 |
Motion Control News & Products

Designfax weekly eMagazine

Archives
Partners
Manufacturing Center
Product Spotlight
Modern Applications News
Metalworking Ideas For
Today's Job Shops
Tooling and Production
Strategies for large
metalworking plants
Versatile Transport System: Turbocharge conveyance
![]() THK's Versatile Transport System is a high-mix production solution that will keep your production line moving. Its linear motor drive enables high-speed operations, and processing can be performed directly on top of the system's freely recirculating sliders. This highly precise, modular system has many unique features, including easily adjustable stop positions, flex layouts with path splitting and parallelization, and easy addition/subtraction of extension pieces.
THK's Versatile Transport System is a high-mix production solution that will keep your production line moving. Its linear motor drive enables high-speed operations, and processing can be performed directly on top of the system's freely recirculating sliders. This highly precise, modular system has many unique features, including easily adjustable stop positions, flex layouts with path splitting and parallelization, and easy addition/subtraction of extension pieces.
View the video.
Tech Tip: How to keep heavy loads balanced
 Some Thomson smart linear actuators have a position-based synchro-nization option to help manage unbalanced loads when using multiple units. The system adjusts the speed of each actuator to keep them starting, moving, and stopping synchronously, regardless of their respective load distribution. So useful. So smart.
Some Thomson smart linear actuators have a position-based synchro-nization option to help manage unbalanced loads when using multiple units. The system adjusts the speed of each actuator to keep them starting, moving, and stopping synchronously, regardless of their respective load distribution. So useful. So smart.
Learn all about this feature.
Micropositioning stages ensure high accuracy
 PI now offers fast delivery of the L-511 linear microposi-tioning stage, which is designed for applications requiring minimum incremental motion down to 20 nm and drive forces up to 22 lb. The L-511 can be combined to form XY or XYZ motion systems and integrated with rotary stages for enhanced flexibility. Features high-load recirculating ball bearings for exceptional durability, even under demanding, repetitive cycles. To enhance positioning accuracy and automation throughput, this stage integrates non-contact, direction-sensing optical reference point switches located at mid-travel.
PI now offers fast delivery of the L-511 linear microposi-tioning stage, which is designed for applications requiring minimum incremental motion down to 20 nm and drive forces up to 22 lb. The L-511 can be combined to form XY or XYZ motion systems and integrated with rotary stages for enhanced flexibility. Features high-load recirculating ball bearings for exceptional durability, even under demanding, repetitive cycles. To enhance positioning accuracy and automation throughput, this stage integrates non-contact, direction-sensing optical reference point switches located at mid-travel.
Learn more.
Robots think and act on the fly at moving assembly line speeds
 Inbolt and FANUC are launching a manufacturing breakthrough enabling FANUC robots to tackle one of the most complex automation challenges: performing production tasks on continuously moving parts at line speeds. With Inbolt's AI-powered 3D vision, manufacturers can now automate screw insertion, bolt rundown, glue application, and other high-precision tasks on parts moving down the line without costly infrastructure investments or cycle time compromises.
Inbolt and FANUC are launching a manufacturing breakthrough enabling FANUC robots to tackle one of the most complex automation challenges: performing production tasks on continuously moving parts at line speeds. With Inbolt's AI-powered 3D vision, manufacturers can now automate screw insertion, bolt rundown, glue application, and other high-precision tasks on parts moving down the line without costly infrastructure investments or cycle time compromises.
Learn more.
Best high-speed rotary bearing in THK history
 THK has developed its best-performing, high-speed rotary bearing ever: the High-Speed, Double-Row Angular Contact Ring BWH. This rotary bearing has balls aligned inside a cage between the inner and outer rings and is part of the THK Rotary Series, along with the cross-roller ring. The main features of this product are its ability to receive loads in all directions as well as its high rigidity and rotational accuracy, which are equal to that of cross-roller rings. By adopting a new structure to change the rolling elements from rollers to balls, this product achieves the greatest high-speed performance ever offered by THK.
THK has developed its best-performing, high-speed rotary bearing ever: the High-Speed, Double-Row Angular Contact Ring BWH. This rotary bearing has balls aligned inside a cage between the inner and outer rings and is part of the THK Rotary Series, along with the cross-roller ring. The main features of this product are its ability to receive loads in all directions as well as its high rigidity and rotational accuracy, which are equal to that of cross-roller rings. By adopting a new structure to change the rolling elements from rollers to balls, this product achieves the greatest high-speed performance ever offered by THK.
Learn more.
Elevating tables: Precise vertical positioning in tight spaces
 As semicon-ductors and optical components become smaller and more sophisticated, the TZ Series of precision elevating tables from IKO International provides exceptional vertical positioning accuracy in a compact size. This unit features a unique wedge mechanism guided in the vertical direction by a pair of IKO C-Lube Super MX linear motion rolling guides arranged in parallel to achieve highly precise positioning with exceptional rigidity. An optional linear encoder provides full closed loop control to achieve positioning accuracy as high as 0.005 mm, with repeatability of +/-0.001 mm.
As semicon-ductors and optical components become smaller and more sophisticated, the TZ Series of precision elevating tables from IKO International provides exceptional vertical positioning accuracy in a compact size. This unit features a unique wedge mechanism guided in the vertical direction by a pair of IKO C-Lube Super MX linear motion rolling guides arranged in parallel to achieve highly precise positioning with exceptional rigidity. An optional linear encoder provides full closed loop control to achieve positioning accuracy as high as 0.005 mm, with repeatability of +/-0.001 mm.
Learn more and get all the specs.
This cobot is all about safety around people
 The COBOTTA PRO from DENSO Robotics is a lightweight, high-speed collaborative robot designed for communication between workers and robots while maximizing productivity. It delivers a blend of productivity and safety for both simple tasks and multi-step processes like assembly and inspection work. The 6-axis unit operates at speeds up to 2,500 mm per sec when no workers are near and slows or stops when people approach. Two models available: PRO 900 (max payload 6 kg) and PRO 1300 (max payload 12 kg). Many more functions and features.
The COBOTTA PRO from DENSO Robotics is a lightweight, high-speed collaborative robot designed for communication between workers and robots while maximizing productivity. It delivers a blend of productivity and safety for both simple tasks and multi-step processes like assembly and inspection work. The 6-axis unit operates at speeds up to 2,500 mm per sec when no workers are near and slows or stops when people approach. Two models available: PRO 900 (max payload 6 kg) and PRO 1300 (max payload 12 kg). Many more functions and features.
Learn more.
Powerful, pull-type clapper solenoids handle myriad jobs
 New powerful, low-profile, pull-type clapper solenoids are available from Magnetic Sensor Systems (MSS). Applications include valve control, locks, starters, ventilators, clamping, sorting, appliances, tools, HVAC, brakes, clutches, switches, mixing, fire suppression systems, door controls, detent latches, and more. The S-16-264 Series of 17 Pull-Type Clapper Solenoids have ampere turns (windings) adjusted to meet the specific force and duty cycle requirements of your application. They provide up to 130 lb (578 N) of force.
New powerful, low-profile, pull-type clapper solenoids are available from Magnetic Sensor Systems (MSS). Applications include valve control, locks, starters, ventilators, clamping, sorting, appliances, tools, HVAC, brakes, clutches, switches, mixing, fire suppression systems, door controls, detent latches, and more. The S-16-264 Series of 17 Pull-Type Clapper Solenoids have ampere turns (windings) adjusted to meet the specific force and duty cycle requirements of your application. They provide up to 130 lb (578 N) of force.
Get all the specs for these solenoids and other options.
Tech Tip: Belt, screw, or chain-driven actuator?
 Bishop-Wisecarver provides a quick, very useful guide to help you evaluate the right drive strategy for your system: belt, screw, or chain-driven actuator. Each drive type has unique advantages and limitations, so evaluating all your options will help you find the most suitable actuator setup for your specific application needs.
Bishop-Wisecarver provides a quick, very useful guide to help you evaluate the right drive strategy for your system: belt, screw, or chain-driven actuator. Each drive type has unique advantages and limitations, so evaluating all your options will help you find the most suitable actuator setup for your specific application needs.
Read the Bishop-Wisecarver blog.
Ultra-precise linear stage -- down to 0.005 microns
 PI, a global leader in precision motion control and nanoposi-tioning, now offers fast delivery of the L-511 linear micropositioning stage, which is designed for applications requiring minimum incremental motion down to 20 nm, drive forces up to 22 lb, and multi-axis configuration options. The L-511 can be combined to form XY or XYZ motion systems and integrated with rotary stages. A variety of drive and encoder options (stepper and servo motors, rotary, and linear encoders) enable ultra-fine sensitivity. Applications include: metrology, laser processing, semiconductors, biotech, optical alignment, and advanced automation.
PI, a global leader in precision motion control and nanoposi-tioning, now offers fast delivery of the L-511 linear micropositioning stage, which is designed for applications requiring minimum incremental motion down to 20 nm, drive forces up to 22 lb, and multi-axis configuration options. The L-511 can be combined to form XY or XYZ motion systems and integrated with rotary stages. A variety of drive and encoder options (stepper and servo motors, rotary, and linear encoders) enable ultra-fine sensitivity. Applications include: metrology, laser processing, semiconductors, biotech, optical alignment, and advanced automation.
Learn more and get all the specs.
Choosing the right stepper motor: PM or hybrid?
 According to the experts at Lin Engineering, there are two primary types of stepper motors to consider: permanent magnet (PM) and hybrid. But which is right for your application? Both types have their advantages and disadvantages, and the choice ultimately depends on your specific requirements.
According to the experts at Lin Engineering, there are two primary types of stepper motors to consider: permanent magnet (PM) and hybrid. But which is right for your application? Both types have their advantages and disadvantages, and the choice ultimately depends on your specific requirements.
Read this informative Lin Engineering article.
New PTFE-free linear guide for precise positioning
 The new drylin WWP linear guide from igus features a PTFE-free locking carriage. Engineered from lubrication-free, high-performance polymers and aluminum, the guide offers a lightweight, hygienic, and low-maintenance alternative to complex mechanical and electronic adjustment systems. It is significantly more compact and lightweight than conventional recirculating ball-bearing systems. Applications include interior components in vehicles, aircraft, and furniture.
The new drylin WWP linear guide from igus features a PTFE-free locking carriage. Engineered from lubrication-free, high-performance polymers and aluminum, the guide offers a lightweight, hygienic, and low-maintenance alternative to complex mechanical and electronic adjustment systems. It is significantly more compact and lightweight than conventional recirculating ball-bearing systems. Applications include interior components in vehicles, aircraft, and furniture.
Learn more and get all the specs.
Heavy-duty gear units for mixing and agitating systems
 MAXXDRIVE industrial gear units from NORD DRIVE-SYSTEMS are an established drive solution for heavy-duty applications. In addition to conveying, lifting, and driving, they also play an important role in mixing and agitating systems. MAXXDRIVE units feature a compact, one-piece UNICASE housing that delivers long service life, easy maintenance, and quiet operation. Their robust design handles high axial and radial loads, achieves output torques up to 2,495,900 lb-in., and powers up to 8,075 hp.
MAXXDRIVE industrial gear units from NORD DRIVE-SYSTEMS are an established drive solution for heavy-duty applications. In addition to conveying, lifting, and driving, they also play an important role in mixing and agitating systems. MAXXDRIVE units feature a compact, one-piece UNICASE housing that delivers long service life, easy maintenance, and quiet operation. Their robust design handles high axial and radial loads, achieves output torques up to 2,495,900 lb-in., and powers up to 8,075 hp.
Learn more.
What are non-captive linear actuators?
 According to PBC Linear, their new non-captive linear actuators are different from the more common external versions of lead screw-driven linear actuators because they allow the lead screw to completely pass through the motor. This fundamental difference offers advantages for designs that have limited space available or for engineers looking to shrink the overall size of their design package.
According to PBC Linear, their new non-captive linear actuators are different from the more common external versions of lead screw-driven linear actuators because they allow the lead screw to completely pass through the motor. This fundamental difference offers advantages for designs that have limited space available or for engineers looking to shrink the overall size of their design package.
Read the full PBC Linear blog.
Güdel introduces Swiss-quality tracks for cobots
 Güdel Inc. is highlighting new technologies at Automate 2025 booth #2418 that demonstrate its unmatched ability to solve automation engineering challenges. One is the Cobomover, a 7th-axis linear track purpose-built for collaborative and lightweight robots. Designed and manufactured in Switzerland, this unit extends the working range of robots up to 5 m, allowing them to operate multiple workstations and perform a variety of tasks without manual repositioning. Compatible with over 60 cobots and small traditional robots.
Güdel Inc. is highlighting new technologies at Automate 2025 booth #2418 that demonstrate its unmatched ability to solve automation engineering challenges. One is the Cobomover, a 7th-axis linear track purpose-built for collaborative and lightweight robots. Designed and manufactured in Switzerland, this unit extends the working range of robots up to 5 m, allowing them to operate multiple workstations and perform a variety of tasks without manual repositioning. Compatible with over 60 cobots and small traditional robots.
Learn more and get all the specs.
Less space junk: Rensselaer research team working with NASA on robot that can refuel satellites
Many technologies that are essential for daily life -- from communications to GPS navigation to weather forecasting -- rely on the thousands of satellites that are orbiting Earth. When those satellites run out of gas and stop working, there's not much that can currently be done to fix them.
"When a satellite runs out of fuel, and you don't have a way to refuel it, that satellite stops working," said John Wen, professor and head of the Department of Electrical, Computer, and Systems Engineering at Rensselaer Polytechnic Institute (RPI). "When that happens, a new satellite is launched to replace the existing satellite."
It's a costly, time-consuming, and increasingly problematic reality as broken-down satellites become part of the growing population of space debris. A team of researchers at RPI, led by Wen, are working with NASA on a solution: a robot that can capture a satellite in space and pull it in to dock, where it would refuel.
"Our part of the research is to specifically look at transporting a massive satellite, which is way beyond the capacity of this robot arm on Earth under gravity," Wen said.
The robotic arm is being built for NASA by Maxar Technologies to be 7 ft long. It is thin, so that it can operate as efficiently as possible in space. It has gears and joints that will allow it to handle a large satellite. But these components also introduce flexibility, Wen said, which adds another layer of complexity.
The researchers at Rensselaer are working with NASA to develop complex algorithms that will control the arm's movement, enabling it to accurately transport and dock a satellite to a berthing station for refueling.
VIDEO: RPI project aims to help refuel satellites in space.
Wen compares the problem to the difficultly of dragging a massive bus along the ice in a hockey rink. Much like the slick ice, the lack of gravity mitigates the challenge of moving a heavy object, but it doesn't necessarily make the task of carefully controlling its movements much easier.
"There will be no human in space to intervene," Wen said. "It's all relying on the ground operator. So, we have to do extensive simulation both in software as well as in hardware to make sure this operation is safe."
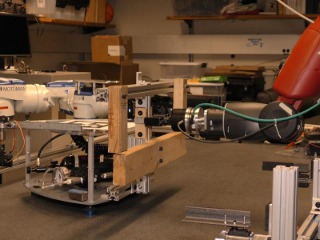
Those simulations are being done, both computationally and physically, in the Center for Automation Technologies and Systems Lab at Rensselaer. For physical simulations, the team uses an air-bearing setup (an air hockey table, essentially) where a small satellite model can float along the surface, simulating a zero-gravity environment. A smaller robotic arm models the movement that will need to take place in space.
"It is really great to be working with NASA on a project where there's a chance that what we're developing is actually going to be used in space," said Kimberly Oakes, a doctoral student in electrical engineering. "That's an opportunity you don't get a lot in the research field."
Wen's team is working with the Satellite Servicing Projects Division at NASA's Goddard Space Flight Center in Greenbelt, MD, as they develop a suite of technologies needed to refuel a satellite in orbit. Beyond that, Wen sees other applications for this work.
"It's getting increasingly difficult to fly heavy payloads into orbit, so when we talk about a lunar mission, Mars mission, et cetera, increasingly the assembly will have to be done in space," Wen said. "The robotic technology we're working on now will be the foundation of such work in the future."
Source: Rensselaer Polytechnic Institute
Published December 2019
Rate this article
View our terms of use and privacy policy